ICRA 2022!
There are some rare events in your life which you know will be the turning point for what comes ahead. ICRA 2022 was one of those for me.
ICRA, the International Conference for Robotics and Automation is the largest robotics conference in the world and witnesses thousands of attendees from dozens of countries. This year’s ICRA was particularly special as it was the first time ICRA was held in person since ICRA 2019 in Montreal. It was special to me too as it was held in Philadelphia right after my graduation ceremony from the University of Pennsylvania. The timing could not be better and I am delighted that NVIDIA fully sponsored me to attend the whole conference comprising of two days of workshops and three days of exhibits, technical talks, and poster presentations. While this isn’t my first international conference, it is my first academic conference.
There was little reason to doubt the scale of the conference when I saw the length of the line for registration at 830am on the opening day. It took me a good 5 minutes to walk to the end of the line, which wrapped around the ground floor of the enormous atrium of the Pennsylvania Convention Center. Standing in line gave me a good chance to survey the crowd, comprising of a mix of industry professionals and PhD students. I guess the professors and post-docs had the good sense to collect their badge from the convention center the previous day since I didn’t see any waiting in line. On reaching the front of the line, I collected my ICRA kit containing my conference badge, an ICRA branded bag, three adorable stickers for my badge to indicate whether I preferred to elbow bump, shake hands, or hug, and (what would become a theme for the conference) an ICRA T-shirt!
I attended the workshops on novel perception techniques and autonomous driving. I also got a sneak peek of the company exhibition booths on the second level of the convention center. Apart from being a great place to meet researchers, I learned ICRA also serves as a recruiting event for several startups and more established robotics companies such as Skydio, Dyson, Motional, and Tesla. Over the following days, I amassed enough company swag to cover my clothing needs for the entire the conference. Had I known better, I would have probably packed a little lighter.
The day ended with a huge networking dinner in the ballroom of the convention center. Over dinner I was pleasantly surprised to meet old friends who I didn’t even know were attending and even one of my TA’s at UPenn who had successfully raised millions of dollars in funding for his autonomous lawnmower startup, Novabot!

The autonomously lawn mowing Novabot, developed by my CIS581 TA Yulai Weng!
It had been such a long time since anyone had attended an event of this size and it was clear that everyone was relishing the opportunity to socialize and geek out. For someone who wouldn’t normally walk up and talk up to people unsolicitedly, I found myself really enjoying the process of introducing myself and learning about what other people were working on.

Networking dinner at the end of day 1! Where’s Waldo?
The next three days formed the main part of the conference with technical presentations, company exhibitions, and boozy recruitment parties. This year’s ICRA adopted a hybrid model for the paper presentations. Compared to the first ICRA in 1985 which had one track with each 25 minute presentations, ICRA in 2022 had 22 parallel tracks with 5 minute lightning talks in the morning and afternoon. I felt 5 minutes was barely enough time to grasp the keywords of the paper, especially if it was in a field which I hadn’t worked in before. Fortunately, the lightning talks were followed by in-depth poster presentations where you can walk up and ask the authors questions about their work. I found great value in the poster presentations and ended up learning a lot by talking to the authors.
As an aside about the hybrid model of presentations, some authors chose to present using a 5 minute video of them speaking over their slides and answering questions over Zoom. It was somewhat ironical that we had gathered from thousands of miles away only to watch a video together.

My school friend’s, Aditya Arun’s, poster presentation!
I also loved attending the company exhibition booths in between the paper presentations, especially those where engineers from the companies came to describe what they were working on. Based on the booths, my impression of the robotics industry is that it is dominated by a new wave of software companies either 1) leveraging existing hardware (particularly UAVs and service bots) for new applications or 2) providing tools for other robotics companies. Companies like Skydio, Shield AI, and OhmniLabs fall into the first category whereas companies like Foxglove and Tangram Vision fall in the second. What was less common was companies providing hardware (such as sensors and motors) to companies in the first category such as Ouster and DirectDrive motors. The exhibitions piqued my curiosity for how these startups discover a market niche and create products to fill said niches.
The second day of the conference ended on a high with the Skydio recruitment party at a bar in Philadelphia’s Chinatown called bar.ly. Over beer, I chatted with some European post-docs and PhD students who had a hand in designing the Mars helicopter, Ingenuity. Ingenuity has to contend with some of the most outlandish conditions any robot has experienced and has to sustain aerial flight in an atmosphere 1% of the thickness of Earth’s. Roughly speaking, that equates to flying a drone at an altitude of 100,000 feet above Earth’s surface (albeit in lower gravity). I also learned that robot localization is much more challenging on Mars, for the planet’s lack of a magnetic field makes magnetometers useless and for the time being at least, the planet is bereft of a GPS/GNSS network. Surprisingly, that makes visual inertial odometry (VIO) the most effective way to localize Martian robots. However, Mars’s surface is devoid of significant visual features which VIO algorithms heavily rely on. To this end, the VIO algorithm for Ingenuity was tested on deserts on Earth which lack significant visual features the way the Martian surface does. As Ingenuity is experimental hardware, it can use the consumer-grade Snapdragon 801 for its flight computer whereas other space robots use much slower, radiation hardened processors for better reliability.
ICRA also had some great keynote talks with Julie Shah opening Day 3 with a talk about what the future of robots and humans working together might look like. It never occurred to me that safety for the humans and task efficiency for the robots working with them could be conflicting goals. Research in this area deals with designing ways robots can better predict the actions of humans and how they can offer social cues when working alongside them. Another challenge is making complex machines like robots easy to train and maintain for operators.

Me at the morning keynote session!
In a more formal setting than the discussions I had about the same topic the previous night, the afternoon keynote talk was by Prof. Vandi Verma at NASA, who spoke about the challenges of space robotics and the development of Ingenuity. I learned that the only picture of the Perseverance rover and Ingenuity in the same frame was shot with painstaking composition and caution, since the robotic arm carrying the camera has to be aligned correctly with the rover’s other instruments. Who would’ve thought that something as simple as taking a picture involves hours of simulations back at NASA?
Ingenuity and Perseverance in the same frame! Hours of planning went into this shot.
I also watched the semifinals and finals of the F1Tenth racing competition in which teams race self-driving 1:10 scale cars on an indoor track. I have particularly fond (and painful) memories of hacking together our own autonomously driven racecar in my second semester at UPenn. It was super impressive to see how far the project had come along with all the top team’s approaches having robust controllers, overtaking maneuvers, and even blocking maneuvers to avoid overtakes. I daresay that it’s even better than watching the ‘real’ F1 races! UPenn’s very own Team ScatterBrain brought the trophy home in a head to head final race with Dzik from the Czech Republic.

Johannes Betz commenting on the F1/10 races!
The day ended with a banquet dinner in the terrace of the convention hall with speeches from Prof. Vijay Kumar at UPenn and Spot from Boston Dynamics raising a toast to all robots (and humans behind them)!
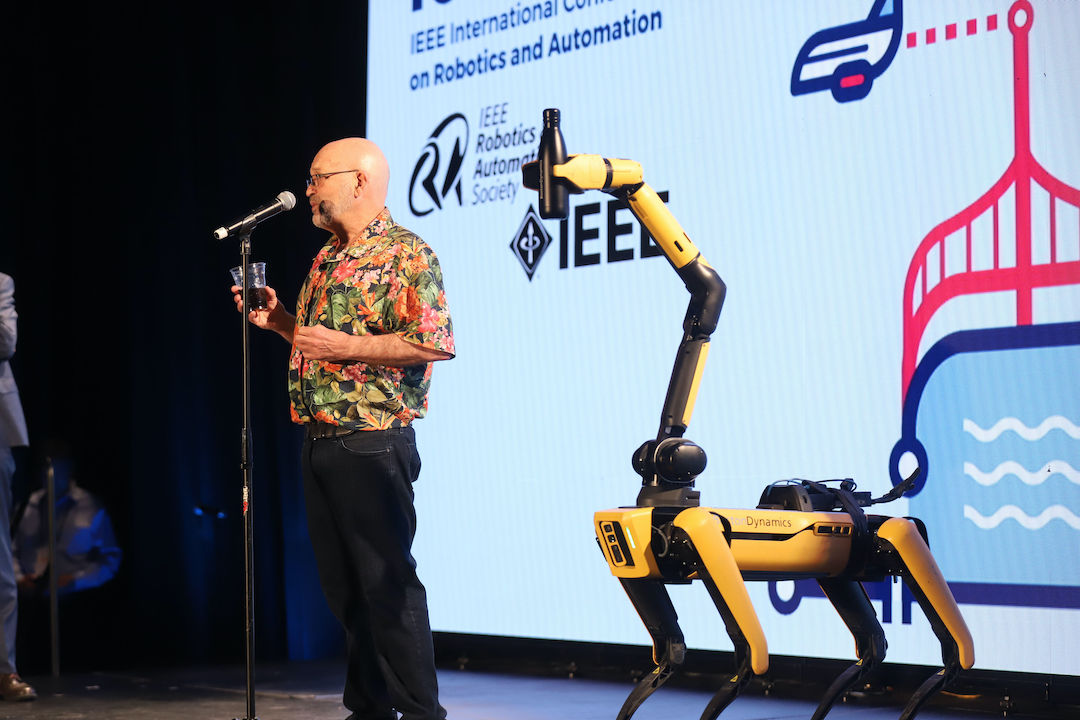
Spot raising a toast to all the robots out there!
The penultimate day of the conference had technical presentations on topics which I work closely on at work - autonomous vehicle navigation and motion planning. Some of the presentations which stood out to me were 1) StopNet for whole scene prediction modelling from Waymo, 2) trajectory generation to maximize information gain in the presence of occlusions and 3) PredictionNet from our very own prediction team at NVIDIA. It was interesting to compare the differences in StopNet and PredictionNet, for the former is a sophisticated prediction model which shows what is possible when you have significant computational resources (more than 1TFLOP per inference!) to throw at the problem whereas the latter is an efficient prediction model which is designed to run in a few milliseconds on the NVIDIA Drive AGX platform. I also came away with the impression that its genuinely difficult to produce good quality research for autonomous vehicles at the university level. Several papers only had results in simulation which is hardly sufficient for demonstrating the validity of an approach. An end-to-end model which goes directly from camera pixel values to steering wheel torques may look impressive when demoed in CARLA, but it seldom holds water when implemented in a real vehicle. For better or for worse, the autonomous vehicles testing pipeline requires trained test drivers, testing tracks, expensive sensors, and of course, cars, which are expensive to retrofit with sensors and specialized hardware. This is very capital intensive and out of the reach for all but a few universities. With some bias, I am of the opinion that for this reason, most of the useful progress in the field will be led by the industry. On that note, the conference session ended with a panel discussion on the future of the AV industry with research leads from Tesla, Motional, Zoox, NVIDIA, Toyota Research International, Waymo, and Qualcomm chiming in. And as on brand for this conference, the night ended in more revelry with Zoox footing the bill for drinks and finger food at the Graffiti Bar in Philadelphia’s Center City.

Robots (and exoskeletons)!
With the technical talks and exhibition booths wrapped up on Thursday, the final day of the conference felt subdued compared to the ones before it, though this is in no small part due to the action of the last handful of days catching up to me. I flitted between workshop rooms to learn more about the latest in neural geometry based motion planning (think NeRFs) and autonomous driving. Lunch was followed by one of my favorite events at ICRA in recent years - the robotics debates. I attended the debate on ‘The investment and involvement of industry giants in robotics research in academia is positive’. At the outset, I felt it would be hard to argue against this topic and voted ‘Yes’ in the pre-debate polls. I was proven wrong by Prof. Ankur Mehta who made an excellent case for how in some ways, the funding offered by huge companies can create perverse incentives for academic research labs to pursue avenues of research which are more oriented towards creating profit for big tech companies. The relation between industry funding and universities is not always as synergistic as it may seem. Personally, I still feel that the industry and universities have benefitted from each other’s goals, but I am more on the fence about if it’s always a good thing. Academia and the robotics industry will always be competing for the best minds to join as PhDs or postdocs in the former’s case and as skilled engineers in the latter’s. What kind of systemic change is required so both can benefit without being at odds with each other?
At this point, my brain had pretty much checked out of ICRA and I attended the final workshop on motion planning under uncertainty, but couldn’t do much more than passively listen.
Despite being physically and mentally tired on the last day, I left the conference feeling very inspired. It’s hard not to be when you get time to interact face-to-face with people who are so venerated in the robotics community. There is something special about the energy of having thousands of people with the same interests together in a single room and I now understand why these conferences are such a big deal. It was a humbling experience too - for it showed me that there was so much I didn’t know in the very field I spent two years getting a masters degree in. I am bullish for the future prospects of robotics as ICRA has showed me that academic and industrial interest in solving the biggest open problems of robotics is at an all time high. People are seriously thinking about the inevitable ways in which our society will change once robotics become much more commonplace. And finally, automation could unlock huge markets of opportunity which didn’t exist before.
On a more personal note, I feel like my trip to the East coast this time has done me a world of good. Last year, I had written about how much I was looking forward to moving out of Philadelphia, but this time, I realized how much I had missed the city. Now that it’s summer, Center City and its numerous parks are filled with people and there is much joy to be found on the streets. The city has a charm which hasn’t been lost on me at all. I long for the spontaneity of urban life when living in the dull suburban sprawl of the South Bay. I feel like the 3000 miles of distance has given me a new perspective to reflect on life since moving to California. I have realized that despite having great friends nearby and a job I look forward to everyday, it all feels strangely devoid of contentment - something I say knowing full well that it comes from a position of immense privilege. That said, the general feeling of discontent is something echoed by the few with whom I’ve dared to broach the topic with as well. This is where I feel the conference was could be a turning point. ICRA has shown me that I feel at my best when talking to people and thinking about robotics outside of work. This is something I which I want to channelize in my weekdays as well, for I feel it’s all to easy to get stuck in a loop of expending one’s mental faculties at work and not leaving room for creative pursuits. There is so, so much magic left in robotics that I simply can’t hope to cover all of it. In a way, it’s a beautiful thing to be in a field where everyone can pick their own set of skills to be unique.